玖诚智能与高校合作研发,历时两年,于今年第三季度推出全新可定制化水下机器人(简称ROV)。本产品适用于长时间复杂环境作业使用,优于国内外同类机器人的探测距离和灵敏度,且支持沉浸式精细操作及丰富的可扩展模块。
本产品采用了一些业界领先的高新技术和具有自主知识产权的专利技术:机器人平台采用8轴矢量推进,具有较好的负载能力和抗流水平,可实现俯仰、翻滚等多自由度机动动作;可以根据操作员的肢体动作直接操控机器人的摄像机和机械手,完成精细的水下操作;采用FOV头盔实时显示水下增强视觉AR图像,具备沉浸式操作感受;而且ROV采用有缆遥控和供电方式,工作时长不受限制。
适用场景
- 水下勘察定位
- 桥梁坝体检修
- 水下运动辅助
本产品包含以下高新技术
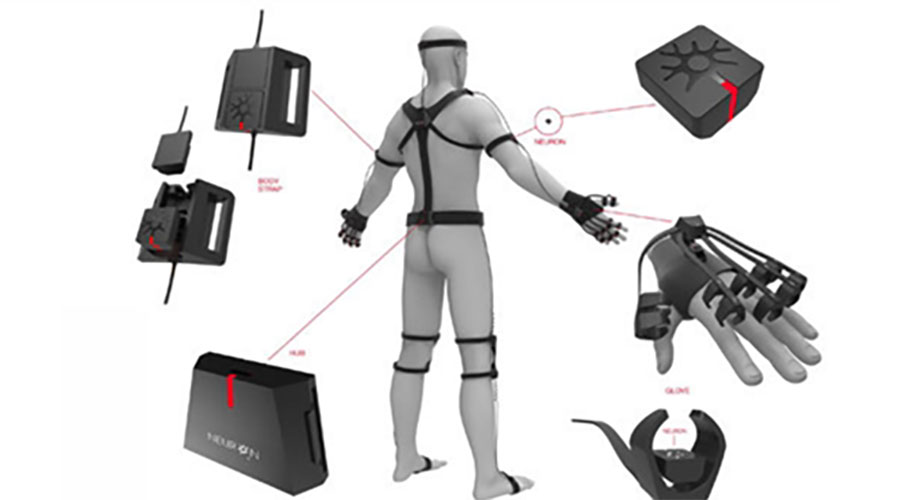
动作捕捉功能
该动捕系统为可穿戴式设备,可以准确的捕捉操作人员头部、手臂、手指的动作。其核心是高精度的传感器节点,节点的尺寸近似于硬币大小,完整的集成了加速度计、陀螺仪以及磁力计的惯性测量单元。该系统可以提供用于水下操作时的手臂和手指动作信息,以及控制摄像头云台的头部动作捕捉。

FOV头盔显示技术
第一人称视角FOV头盔提供了立体的双目视觉显示方案,可以使操作人员具有身临其境的感觉。其清晰度、分辨率、亮度、沉浸感均远远超过平面显示技术,非常适合ROV操控和机械手的精细操作。
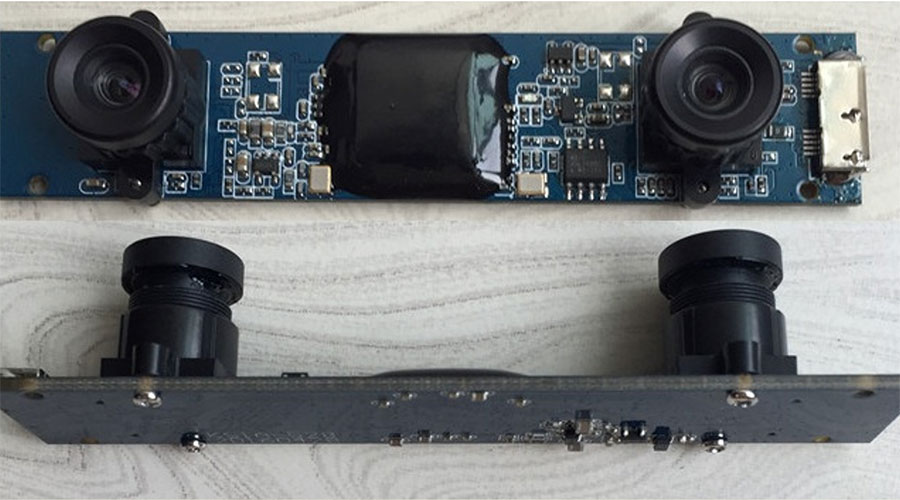
仿生视觉AR技术
FOV的三维图像信号来源于一个带云台的双目摄像头,该摄像头采用仿生原理,两个图像传感器具有近似人眼的间距,采用严格的同步技术保证图像采样的准确性。在叠加ROV的姿态信息、航行信息、操控信息甚至自动识别后的目标信息之后,输出至FOV头盔用于增强现实AR显示。
水下机械臂和机械手技术
水下机械臂和机械手是实现ROV水下操作的动作机构。其中机械臂采用6自由度设计,使用钛合金材料制造,重量轻,强度大。由大扭力水下舵机驱动,可以精细模拟人体手臂、手肘、手腕部的关节动作。机械手也采用仿生学设计,5个手指可灵活的自由动作。两者相配合,可以在水下完成较为复杂的操作动作。
层级式分布光场投射技术及可变束集束光源
在水下采用传统的均匀照明方法会导致近距离内形成强烈的后向散射背景,接收器接收到的远处目标信噪比极低。为了获得大视角和较远的水下探测距离,我们使用了一种新的水下照明方法——水下层级分布光场投射方法。该方法根据水介质光衰减规律,形成非均匀分布的照明光场,可使光场能量根据任务需要进行科学分布,使得探测距离达到1.8倍能见度以上,具有功耗低、体积小、重量轻、寿命长、易搭载等优点。
可变束集束光源是建立可控制能量分布的探测光场的关键。可变束集束光源在中心保持较高的亮度,形成高能量密度光束,用以照明较远的区域;在边缘有可控发射角的弱光束,形成低能量密度光束,用以照明较近的区域。
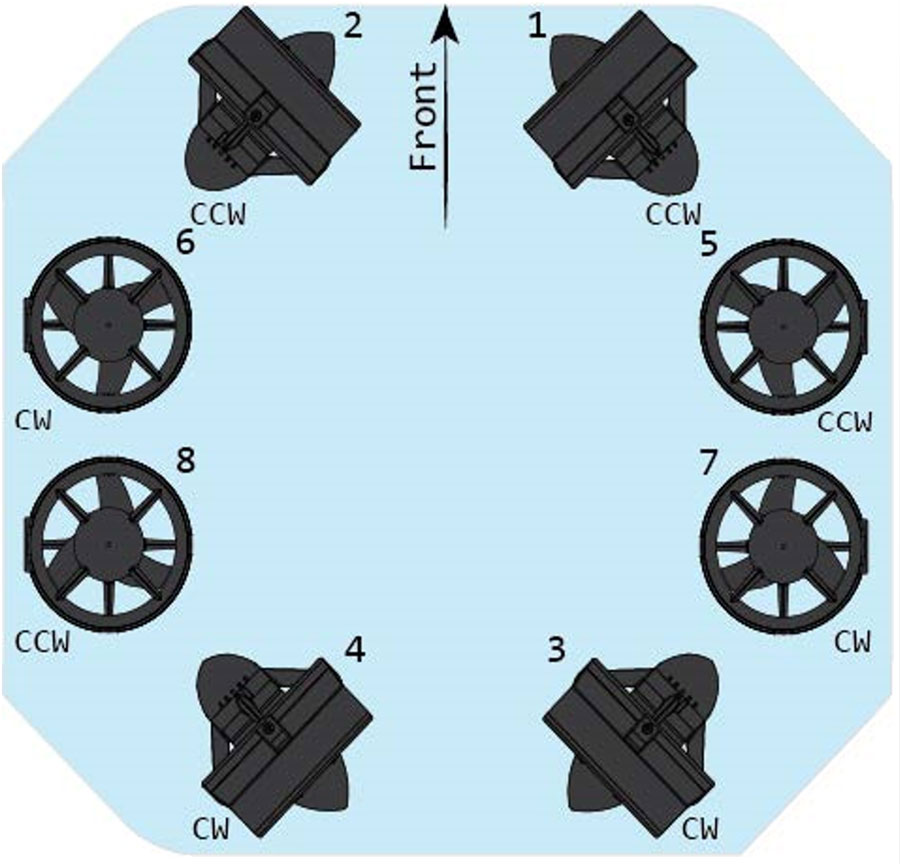
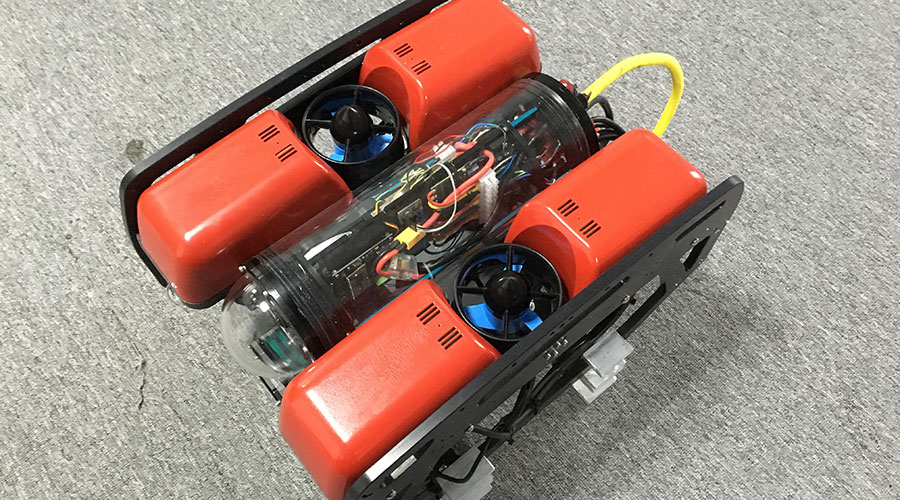
8轴矢量推进水下机器人平台
该ROV平台配有水下自动导航仪和姿态控制装置,采用4具推进器水平矢量布置,4具推进器垂直布置的方式,在具有较好搭载能力的基础上,还可实现多自由度机动及动力定位功能,抗流能力强。机器人框架采用高密度HDPE材料,具有体积小,重量轻,耐腐蚀,机动灵活的特点。
产品技术特点
- 推进器数量:共6个(可增加为8个),2个垂直(可增加为4个),4个水平矢量分布
- 工作深度:100米,可选购300米
- 水平速度:最大3节
- 脐带电缆:10毫米直径凯芙拉缆,标配100米,可定制长度
- 摄像系统:双目摄像系统,单个传感器1/4英寸,3um像素,YUV422彩色8bit 2560*720@24~31fps
- 照明系统:超亮水下LED灯组,亮度可调,光束角度可调
- 航向控制:数字罗盘(带自动维持航向和数显功能)
- 深度控制:深度传感器(带自动维持深度和数显功能)
- 供电电源:220V交流电或锂电池供电
- 最大功率:1000W
- 存储:2个便携式STORMCASE防水箱
- 重量:水下模块10公斤,整套系统60公斤(空气中的重量)
- 尺寸:水下模块450x360x260毫米
产品基本配置
- 水下机器人本体(工作深度100米)
- 200米长10毫米口径脐带电缆
- 数字罗经(带定向和数显功能)
- 深度传感器(带定深和数显功能)
- 摄像俯仰伺服角度±50°
- 带滑环脐带电缆手动绞车
- 船载控制及电源单元
- 19英寸液晶显示器
- 保护型聚丙烯帧浮力和支持模块
- 两个特制运输密封箱
- 控制手柄
- 连接缆
- 维护工具套件
- 操作手册